1.9 KiB
1.9 KiB
在Vscode中调试ROS
单节点应用
-
在编译前在CMakeLists.txt文件中,指定Debug编译模式
set(CMAKE_BUILD_TYPE Debug) -
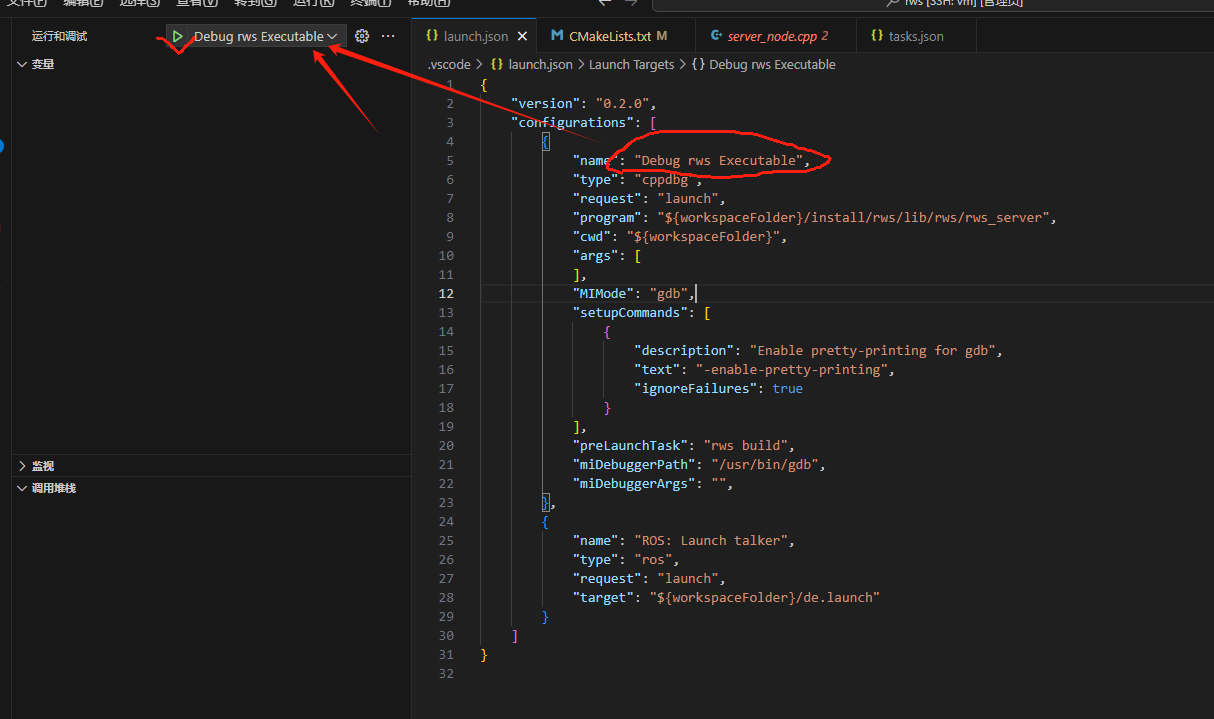
配置launch.json 和tasks.json(在根目录.vscode文件夹中)
// tasks.json { // See https://go.microsoft.com/fwlink/?LinkId=733558 // for the documentation about the tasks.json format "version": "2.0.0", "tasks": [ { "label": "rws build", // 名称自定义,要与launch.josn文件要一致 @1 "type": "shell", "command": "source ${workspaceFolder}/install/setup.sh" // "command": "colcon build && source ${workspaceFolder}/install/setup.sh" // 不一定调试都需要重新编译 }, ] }//launch.json { "version": "0.2.0", "configurations": [ { "name": "Debug rws Executable", // 名称自定义 "type": "cppdbg", "request": "launch", "program": "${workspaceFolder}/install/rws/lib/rws/rws_server", // 编译好的可执行程序所在路径 "cwd": "${workspaceFolder}", // 工作目录,默认即可 "args": [ // 调试阶段需要传递给可执行程序的参数 ], "MIMode": "gdb", "setupCommands": [ { "description": "Enable pretty-printing for gdb", "text": "-enable-pretty-printing", "ignoreFailures": true } ], "preLaunchTask": "rws build", // 这里需要与上面的task.json的名称对应 @1 "miDebuggerPath": "/usr/bin/gdb", "miDebuggerArgs": "", }, ] } -
调试